Projektowanie konstrukcji wymaga zachowania dużej staranności oraz dokładności. Punkty pomocnicze stanowią olbrzymie ułatwienie w lokalizowaniu położenia obiektów. Punków pomocniczych można używać rysując geometrię pomocniczą typu punkty, linie, łuki oraz lokalizując położenie elementów konstrukcji.
Funkcja punkty pomocnicze występuje we wszystkich modułach projektowych 3D, module PROFIL oraz module rysunkowym D-CAD 2D. Ze względu na jej pomocniczy charakter, dostęp do niej wymaga wywołania komendy nadrzędnej na przykład wstawienie elementu konstrukcji, rysowanie geometrii lub wykonywanie pomiaru. Funkcja punkty pomocnicze wywoływana jest za pomocą środkowego przycisku myszy (scroll’a). Na ekranie pojawia się podręczne menu z dostępnymi opcjami.
Funkcja punkty pomocnicze daje możliwość zagnieżdżania, czyli wielokrotnego wyboru.
Lista dostępnych opcji – punkty pomocnicze
| przecięcie linii – Rzeczywisty punkt przecięcia linii. |  |
|
przecięcie linii pozorne – Punkt przecięcia linii powstały w wyniku ich przedłużenia do punktu przecięcia. |
 |
| środek – linia/łuk – Punkt będący środkiem linii lub odcinka łuku. |  |
| środek – odcinek – Punkt będący środkiem odcinka wskazanego przez dwa punkty. |  |
|
punkt na linii – Dowolny punkt na wskazanej linii. Użytkownik kontroluje położenie punkt za pomocą jednego z trzech parametrów: położenia wzdłuż linii (dL), położenie w kierunku osi X (dX) oraz położenie w kierunku osi Y (dY). |
 |
| punkt odniesienia – Punkt wyznaczony przez odległości od punktu bazowego. Funkcja zawiera kilka opcji. | |
| punkt odniesienia/przyrosty dX – dY – Punkt wyznaczony przez odległości od punktu bazowego. Odległości podawane są w formie przyrostów w kierunku osi X i Y. |  |
| punkt odniesienia/kąt + dX – Punkt wyznaczony przez odległości od punktu bazowego. Punkt wyznaczony przez kierunek opisany kątem nachylenia do osi X oraz odległością wzdłuż osi X. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. |
 |
| punkt odniesienia/kąt + dY – Punkt wyznaczony przez odległości od punktu bazowego. Punkt wyznaczony przez kierunek opisany kątem nachylenia do osi X oraz odległością wzdłuż osi Y. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. |
 |
| punkt odniesienia/kat + dL – Punkt wyznaczony przez odległości od punktu bazowego. Punkt wyznaczony przez kierunek opisany kątem nachylenia do osi X oraz odległością wzdłuż wybranego kierunku dL. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. |
 |
| punkt odniesienia/pkt 2 + dL – Punkt wyznaczony przez odległości od punktu bazowego. Kierunek przesunięcie wyznaczony jest przez wektor utworzony przez pkt 1 oraz pkt 2 oraz odległością wzdłuż wybranego kierunku dL. |
 |
| pkt 1 – pkt 2 + dL – Punkt wyznaczony przez odległości od punktu bazowego. Kierunek przesunięcie wyznaczony jest przez wektor utworzony przez pkt 1 oraz pkt 2. | |
| pkt 1 – X/pkt 2 – Y – Punkt wyznaczony przez współrzędne dwóch punktów. Punkt nr 1 określa współrzędną X, punkt nr 2 określa współrzędną Y, nowego punktu. |  |
| pkt 1 – R1/pkt 2 – R2 – Punkt wyznaczony jest przez przecięcie okręgów. Z punkt nr 1 kreślony jest okrąg o promieniu R1, z punkt nr 2 kreślony jest okrąg o promieniu R2. Przecięcie okręgów następuje w dwóch punktach, użytkownik musi wybrać jeden z nich. Funkcja wymaga aby suma wartość promieni okręgów była większa niż odległość między wskazanymi punktami. |  |
| prostopadle do linii – Punkt wyznaczony przez prostopadłe rzutowanie punktu na wybraną linię. |  |
| poziomo do linii – Punkt wyznaczony przez poziome rzutowanie punktu na wybraną linię. |  |
| pionowo do linii – Punkt wyznaczony przez pionowe rzutowanie punktu na wybraną linię. | 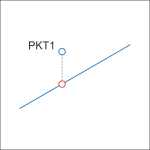 |
| kąt do linii – Punkt wyznaczony przez rzutowanie pod określonym kątem punktu, na wybraną linię. Kąt mierzony jest od osi X. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. |  |
| kąt + dX – Punkt wyznaczony przez kierunek opisany kątem nachylenia do osi X oraz odległością wzdłuż osi X. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. | |
| kąt + dY – Punkt wyznaczony przez kierunek opisany kątem nachylenia do osi X oraz odległością wzdłuż osi Y. Dodatnia wartość kąta mierzona jest przeciwnie do kierunku ruchu wskazówek zegara. | |
|
centrum – koło/łuk – Punkt wyznaczony przez środek koła lub łuku.
|
 |
| kwadrant – koło/łuk – Punkt wyznaczony przez kwadranty koła lub łuku. Kwadrant to ćwiartka koła lub łuku. | 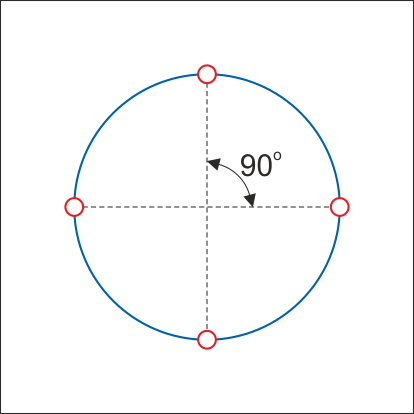 |
| styczna – koło/łuk – Punkt wyznaczony na kole lub łuku przez linię styczną do niego. |  |
WSKAZÓWKA: niektóre punkty charakterystyczne mogą być wyszukiwane w sposób dynamiczny i automatyczny. Więcej w artykule tutaj.